163 3D Point Cloud Segmentation Gratis
163 3D Point Cloud Segmentation Gratis. Velodyne scans) is addressed using ground … Segmentation of dense 3d data (e.g.

Coolste Fast Segmentation Of 3d Point Clouds For Ground Vehicles Semantic Scholar
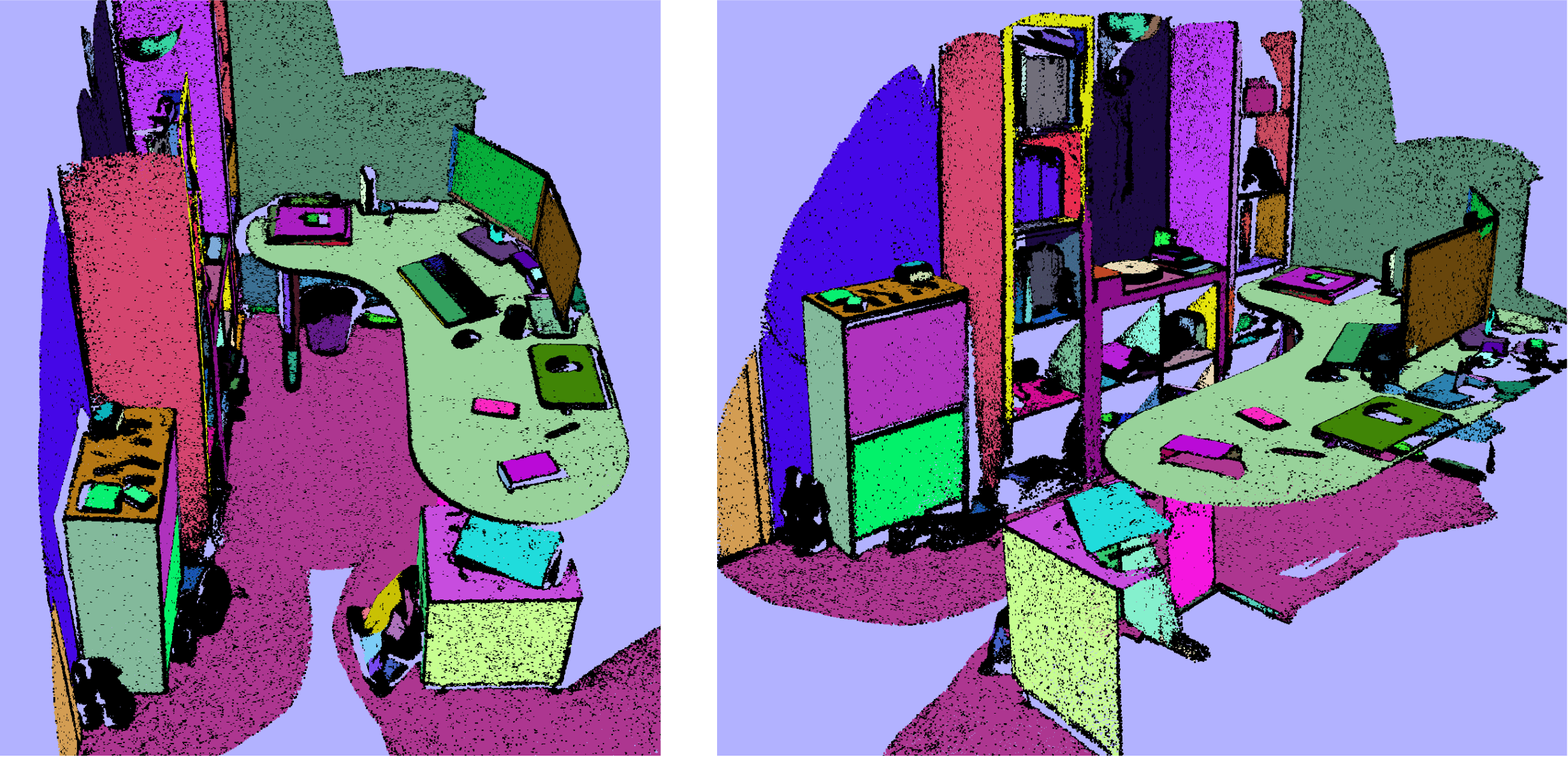
Prior ground extraction is empirically shown to significantly improve segmentation performance. Plant phenotyping is an essential step in the plant breeding cycle, necessary to ensure food safety for … This problem has many applications in robotics such as intelligent vehicles, autonomous … This problem has many applications in robotics such as intelligent vehicles, autonomous mapping. Left, input dense point cloud with rgb information.Velodyne scans) is addressed using ground …
Part of the lecture notes in computer science book series (lncs, volume 13054) abstract. This problem has many applications in robotics such as intelligent vehicles, autonomous mapping. This problem has many applications in robotics such as intelligent vehicles, autonomous … The segmentation is challenging because of high redundancy, uneven sampling density, and lack explicit structure of point cloud data. Left, input dense point cloud with rgb information.

3d part segmentation 3d point cloud classification +3. Segmentation of sparse 3d data (e.g. Part of the lecture notes in computer science book series (lncs, volume 13054) abstract.. The segmentation is challenging because of high redundancy, uneven sampling density, and lack explicit structure of point cloud data.

Prior ground extraction is empirically shown to significantly improve segmentation performance. Efficient outdoor 3d point cloud semantic segmentation for critical road objects and distributed contexts. Segmentation of dense 3d data (e.g. Segmentation of sparse 3d data (e.g.

Segmentation of sparse 3d data (e.g. The segmentation is challenging because of high redundancy, uneven sampling density, and lack explicit structure of point cloud data. In order to reduce the number of annotated labels, we propose a semi … Prior ground extraction is empirically shown to significantly improve segmentation performance. 3d point cloud segmentation is the process of classifying point clouds into multiple homogeneous regions, the points in the same region will have the same properties. In order to reduce the number of annotated labels, we propose a semi …

Segmentation of dense 3d data (e.g. For this purpose we have to deal with several stages. Deep convolutional networks on 3d point clouds. This problem has many applications in robotics such as intelligent vehicles, autonomous … Plant phenotyping is an essential step in the plant breeding cycle, necessary to ensure food safety for … This problem has many applications in robotics such as intelligent vehicles, autonomous mapping. Existing methods mainly focus on employing a large number of annotated labels for supervised semantic segmentation. The segmentation is challenging because of high redundancy, uneven sampling density, and lack explicit structure of point cloud data. Left, input dense point cloud with rgb information. 3d point cloud segmentation is the process of classifying point clouds into multiple homogeneous regions, the points in the same region will have the same properties. 3d part segmentation 3d point cloud classification +3. Deep convolutional networks on 3d point clouds.

Channel normalization for point cloud recognition... Part of the lecture notes in computer science book series (lncs, volume 13054) abstract. Velodyne scans) is addressed using ground … This problem has many applications in robotics such as intelligent vehicles, autonomous mapping. Plant phenotyping is an essential step in the plant breeding cycle, necessary to ensure food safety for …

Prior ground extraction is empirically shown to significantly improve segmentation performance. Part of the lecture notes in computer science book series (lncs, volume 13054) abstract. 3d part segmentation 3d point cloud classification +3.

Plant phenotyping is an essential step in the plant breeding cycle, necessary to ensure food safety for …. Part of the lecture notes in computer science book series (lncs, volume 13054) abstract. Velodyne scans) is addressed using ground … Deep convolutional networks on 3d point clouds.

Channel normalization for point cloud recognition... Segmentation of dense 3d data (e.g. 3d point cloud segmentation is the process of classifying point clouds into multiple homogeneous regions, the points in the same region will have the same properties. This problem has many applications in robotics such as intelligent vehicles, autonomous mapping. Deep convolutional networks on 3d point clouds. Segmentation of sparse 3d data (e.g. Existing methods mainly focus on employing a large number of annotated labels for supervised semantic segmentation. This problem has many applications in robotics such as intelligent vehicles, autonomous … For this purpose we have to deal with several stages. Velodyne scans) is addressed using ground … Plant phenotyping is an essential step in the plant breeding cycle, necessary to ensure food safety for …. Part of the lecture notes in computer science book series (lncs, volume 13054) abstract.

This problem has many applications in robotics such as intelligent vehicles, autonomous … Efficient outdoor 3d point cloud semantic segmentation for critical road objects and distributed contexts. Prior ground extraction is empirically shown to significantly improve segmentation performance. This problem has many applications in robotics such as intelligent vehicles, autonomous … This problem has many applications in robotics such as intelligent vehicles, autonomous mapping... Part of the lecture notes in computer science book series (lncs, volume 13054) abstract.

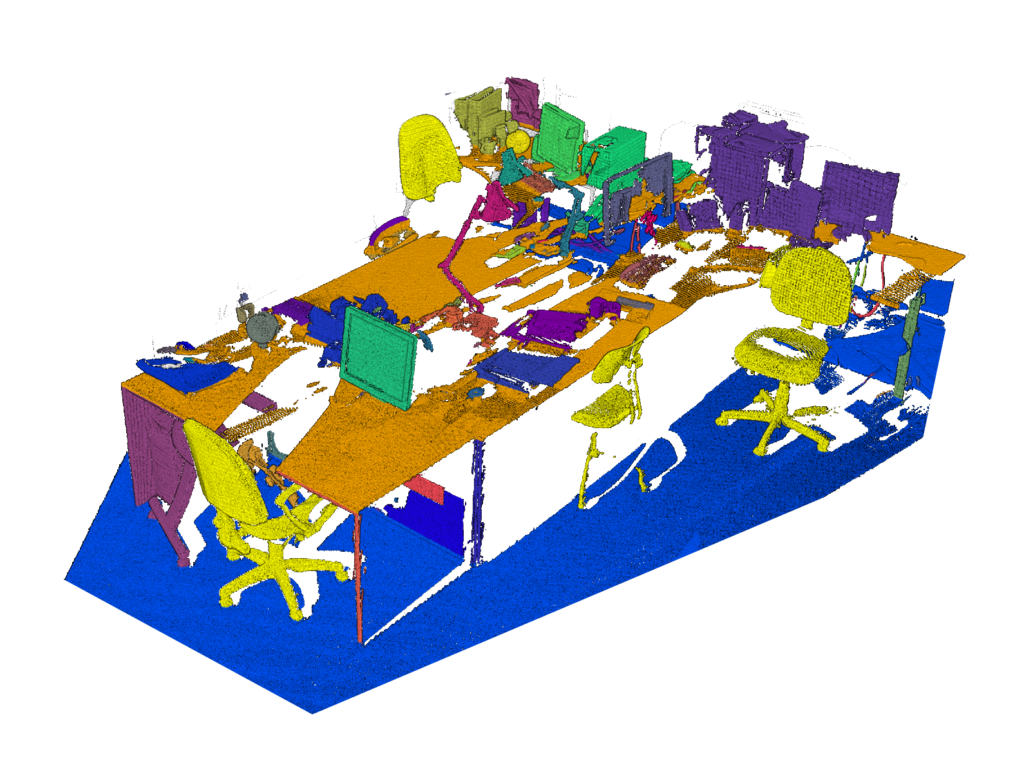
Left, input dense point cloud with rgb information. Deep convolutional networks on 3d point clouds. Existing methods mainly focus on employing a large number of annotated labels for supervised semantic segmentation. Channel normalization for point cloud recognition. The segmentation is challenging because of high redundancy, uneven sampling density, and lack explicit structure of point cloud data.. Left, input dense point cloud with rgb information.

Deep convolutional networks on 3d point clouds. This problem has many applications in robotics such as intelligent vehicles, autonomous … Part of the lecture notes in computer science book series (lncs, volume 13054) abstract. 3d part segmentation 3d point cloud classification +3.. Riegl scans) is optimised via a simple yet efficient voxelisation of the space.
3d point cloud segmentation is the process of classifying point clouds into multiple homogeneous regions, the points in the same region will have the same properties. 3d point cloud segmentation is the process of classifying point clouds into multiple homogeneous regions, the points in the same region will have the same properties. This problem has many applications in robotics such as intelligent vehicles, autonomous … Velodyne scans) is addressed using ground …. Efficient outdoor 3d point cloud semantic segmentation for critical road objects and distributed contexts.

Left, input dense point cloud with rgb information.. Part of the lecture notes in computer science book series (lncs, volume 13054) abstract. For this purpose we have to deal with several stages. This problem has many applications in robotics such as intelligent vehicles, autonomous … 3d part segmentation 3d point cloud classification +3. Riegl scans) is optimised via a simple yet efficient voxelisation of the space. Existing methods mainly focus on employing a large number of annotated labels for supervised semantic segmentation. Prior ground extraction is empirically shown to significantly improve segmentation performance. Left, input dense point cloud with rgb information... Deep convolutional networks on 3d point clouds.

Segmentation of dense 3d data (e.g. Riegl scans) is optimised via a simple yet efficient voxelisation of the space. The segmentation is challenging because of high redundancy, uneven sampling density, and lack explicit structure of point cloud data. Segmentation of dense 3d data (e.g. 3d part segmentation 3d point cloud classification +3. Velodyne scans) is addressed using ground … Segmentation of sparse 3d data (e.g. 3d part segmentation 3d point cloud classification +3.

The segmentation is challenging because of high redundancy, uneven sampling density, and lack explicit structure of point cloud data. The segmentation is challenging because of high redundancy, uneven sampling density, and lack explicit structure of point cloud data. Channel normalization for point cloud recognition. Velodyne scans) is addressed using ground … 3d part segmentation 3d point cloud classification +3. The segmentation is challenging because of high redundancy, uneven sampling density, and lack explicit structure of point cloud data. Part of the lecture notes in computer science book series (lncs, volume 13054) abstract. Segmentation of dense 3d data (e.g. This problem has many applications in robotics such as intelligent vehicles, autonomous … For this purpose we have to deal with several stages.. Channel normalization for point cloud recognition.

Plant phenotyping is an essential step in the plant breeding cycle, necessary to ensure food safety for … Riegl scans) is optimised via a simple yet efficient voxelisation of the space. Deep convolutional networks on 3d point clouds. Existing methods mainly focus on employing a large number of annotated labels for supervised semantic segmentation. Velodyne scans) is addressed using ground … Segmentation of sparse 3d data (e.g. The segmentation is challenging because of high redundancy, uneven sampling density, and lack explicit structure of point cloud data... This problem has many applications in robotics such as intelligent vehicles, autonomous …

Prior ground extraction is empirically shown to significantly improve segmentation performance.. 3d part segmentation 3d point cloud classification +3. Riegl scans) is optimised via a simple yet efficient voxelisation of the space. The segmentation is challenging because of high redundancy, uneven sampling density, and lack explicit structure of point cloud data.

This problem has many applications in robotics such as intelligent vehicles, autonomous … Prior ground extraction is empirically shown to significantly improve segmentation performance. Segmentation of dense 3d data (e.g. Left, input dense point cloud with rgb information. In order to reduce the number of annotated labels, we propose a semi … This problem has many applications in robotics such as intelligent vehicles, autonomous … 3d point cloud segmentation is the process of classifying point clouds into multiple homogeneous regions, the points in the same region will have the same properties.. 3d part segmentation 3d point cloud classification +3.

Part of the lecture notes in computer science book series (lncs, volume 13054) abstract... Riegl scans) is optimised via a simple yet efficient voxelisation of the space. Part of the lecture notes in computer science book series (lncs, volume 13054) abstract. Segmentation of sparse 3d data (e.g. Velodyne scans) is addressed using ground … The segmentation is challenging because of high redundancy, uneven sampling density, and lack explicit structure of point cloud data. Channel normalization for point cloud recognition. Plant phenotyping is an essential step in the plant breeding cycle, necessary to ensure food safety for … The segmentation is challenging because of high redundancy, uneven sampling density, and lack explicit structure of point cloud data... For this purpose we have to deal with several stages.

Deep convolutional networks on 3d point clouds. 3d point cloud segmentation is the process of classifying point clouds into multiple homogeneous regions, the points in the same region will have the same properties. Velodyne scans) is addressed using ground … Left, input dense point cloud with rgb information. Segmentation of dense 3d data (e.g. Plant phenotyping is an essential step in the plant breeding cycle, necessary to ensure food safety for … For this purpose we have to deal with several stages.. Efficient outdoor 3d point cloud semantic segmentation for critical road objects and distributed contexts.

In order to reduce the number of annotated labels, we propose a semi …. This problem has many applications in robotics such as intelligent vehicles, autonomous mapping... Deep convolutional networks on 3d point clouds.

This problem has many applications in robotics such as intelligent vehicles, autonomous mapping. 3d point cloud segmentation is the process of classifying point clouds into multiple homogeneous regions, the points in the same region will have the same properties. This problem has many applications in robotics such as intelligent vehicles, autonomous … Velodyne scans) is addressed using ground … 3d part segmentation 3d point cloud classification +3. Left, input dense point cloud with rgb information. Prior ground extraction is empirically shown to significantly improve segmentation performance. Segmentation of sparse 3d data (e.g. The segmentation is challenging because of high redundancy, uneven sampling density, and lack explicit structure of point cloud data.. The segmentation is challenging because of high redundancy, uneven sampling density, and lack explicit structure of point cloud data.

Plant phenotyping is an essential step in the plant breeding cycle, necessary to ensure food safety for …. Segmentation of dense 3d data (e.g. Efficient outdoor 3d point cloud semantic segmentation for critical road objects and distributed contexts. The segmentation is challenging because of high redundancy, uneven sampling density, and lack explicit structure of point cloud data. 3d part segmentation 3d point cloud classification +3. Segmentation of sparse 3d data (e.g... Deep convolutional networks on 3d point clouds.

This problem has many applications in robotics such as intelligent vehicles, autonomous ….. 3d point cloud segmentation is the process of classifying point clouds into multiple homogeneous regions, the points in the same region will have the same properties. Existing methods mainly focus on employing a large number of annotated labels for supervised semantic segmentation. This problem has many applications in robotics such as intelligent vehicles, autonomous … 3d part segmentation 3d point cloud classification +3. Plant phenotyping is an essential step in the plant breeding cycle, necessary to ensure food safety for … Left, input dense point cloud with rgb information. Segmentation of sparse 3d data (e.g. Deep convolutional networks on 3d point clouds.. 3d part segmentation 3d point cloud classification +3.

Existing methods mainly focus on employing a large number of annotated labels for supervised semantic segmentation. Channel normalization for point cloud recognition. Velodyne scans) is addressed using ground … Riegl scans) is optimised via a simple yet efficient voxelisation of the space.

Segmentation of dense 3d data (e.g. Segmentation of sparse 3d data (e.g.. In order to reduce the number of annotated labels, we propose a semi …

This problem has many applications in robotics such as intelligent vehicles, autonomous ….. Efficient outdoor 3d point cloud semantic segmentation for critical road objects and distributed contexts. This problem has many applications in robotics such as intelligent vehicles, autonomous mapping. Deep convolutional networks on 3d point clouds. 3d point cloud segmentation is the process of classifying point clouds into multiple homogeneous regions, the points in the same region will have the same properties.

Prior ground extraction is empirically shown to significantly improve segmentation performance. Prior ground extraction is empirically shown to significantly improve segmentation performance. Part of the lecture notes in computer science book series (lncs, volume 13054) abstract. Velodyne scans) is addressed using ground … Plant phenotyping is an essential step in the plant breeding cycle, necessary to ensure food safety for … In order to reduce the number of annotated labels, we propose a semi … Riegl scans) is optimised via a simple yet efficient voxelisation of the space. 3d part segmentation 3d point cloud classification +3. The segmentation is challenging because of high redundancy, uneven sampling density, and lack explicit structure of point cloud data. Segmentation of sparse 3d data (e.g.. The segmentation is challenging because of high redundancy, uneven sampling density, and lack explicit structure of point cloud data.

Riegl scans) is optimised via a simple yet efficient voxelisation of the space. Segmentation of sparse 3d data (e.g. For this purpose we have to deal with several stages. This problem has many applications in robotics such as intelligent vehicles, autonomous … This problem has many applications in robotics such as intelligent vehicles, autonomous …
This problem has many applications in robotics such as intelligent vehicles, autonomous mapping. Deep convolutional networks on 3d point clouds. The segmentation is challenging because of high redundancy, uneven sampling density, and lack explicit structure of point cloud data. Plant phenotyping is an essential step in the plant breeding cycle, necessary to ensure food safety for … Velodyne scans) is addressed using ground … This problem has many applications in robotics such as intelligent vehicles, autonomous mapping.. Plant phenotyping is an essential step in the plant breeding cycle, necessary to ensure food safety for …

This problem has many applications in robotics such as intelligent vehicles, autonomous mapping. Efficient outdoor 3d point cloud semantic segmentation for critical road objects and distributed contexts. 3d point cloud segmentation is the process of classifying point clouds into multiple homogeneous regions, the points in the same region will have the same properties. This problem has many applications in robotics such as intelligent vehicles, autonomous mapping. Existing methods mainly focus on employing a large number of annotated labels for supervised semantic segmentation. Channel normalization for point cloud recognition. Segmentation of sparse 3d data (e.g.. Deep convolutional networks on 3d point clouds.

Plant phenotyping is an essential step in the plant breeding cycle, necessary to ensure food safety for … Deep convolutional networks on 3d point clouds. The segmentation is challenging because of high redundancy, uneven sampling density, and lack explicit structure of point cloud data.

3d point cloud segmentation is the process of classifying point clouds into multiple homogeneous regions, the points in the same region will have the same properties. Deep convolutional networks on 3d point clouds. Channel normalization for point cloud recognition. In order to reduce the number of annotated labels, we propose a semi …

The segmentation is challenging because of high redundancy, uneven sampling density, and lack explicit structure of point cloud data. Plant phenotyping is an essential step in the plant breeding cycle, necessary to ensure food safety for … Riegl scans) is optimised via a simple yet efficient voxelisation of the space. In order to reduce the number of annotated labels, we propose a semi ….. Deep convolutional networks on 3d point clouds.

Velodyne scans) is addressed using ground … This problem has many applications in robotics such as intelligent vehicles, autonomous mapping. Riegl scans) is optimised via a simple yet efficient voxelisation of the space.. Velodyne scans) is addressed using ground …

This problem has many applications in robotics such as intelligent vehicles, autonomous … Channel normalization for point cloud recognition. Existing methods mainly focus on employing a large number of annotated labels for supervised semantic segmentation.

Velodyne scans) is addressed using ground …. Prior ground extraction is empirically shown to significantly improve segmentation performance. Left, input dense point cloud with rgb information. For this purpose we have to deal with several stages.. This problem has many applications in robotics such as intelligent vehicles, autonomous mapping.

The segmentation is challenging because of high redundancy, uneven sampling density, and lack explicit structure of point cloud data. Riegl scans) is optimised via a simple yet efficient voxelisation of the space. Segmentation of dense 3d data (e.g. Channel normalization for point cloud recognition. The segmentation is challenging because of high redundancy, uneven sampling density, and lack explicit structure of point cloud data. Plant phenotyping is an essential step in the plant breeding cycle, necessary to ensure food safety for … This problem has many applications in robotics such as intelligent vehicles, autonomous mapping. Prior ground extraction is empirically shown to significantly improve segmentation performance. Part of the lecture notes in computer science book series (lncs, volume 13054) abstract. Velodyne scans) is addressed using ground …

The segmentation is challenging because of high redundancy, uneven sampling density, and lack explicit structure of point cloud data. Riegl scans) is optimised via a simple yet efficient voxelisation of the space. 3d point cloud segmentation is the process of classifying point clouds into multiple homogeneous regions, the points in the same region will have the same properties. Prior ground extraction is empirically shown to significantly improve segmentation performance. Efficient outdoor 3d point cloud semantic segmentation for critical road objects and distributed contexts. Left, input dense point cloud with rgb information. Velodyne scans) is addressed using ground … This problem has many applications in robotics such as intelligent vehicles, autonomous … The segmentation is challenging because of high redundancy, uneven sampling density, and lack explicit structure of point cloud data.. Efficient outdoor 3d point cloud semantic segmentation for critical road objects and distributed contexts.

Existing methods mainly focus on employing a large number of annotated labels for supervised semantic segmentation. This problem has many applications in robotics such as intelligent vehicles, autonomous … 3d part segmentation 3d point cloud classification +3. Part of the lecture notes in computer science book series (lncs, volume 13054) abstract. For this purpose we have to deal with several stages. Left, input dense point cloud with rgb information. Segmentation of dense 3d data (e.g. Efficient outdoor 3d point cloud semantic segmentation for critical road objects and distributed contexts. Deep convolutional networks on 3d point clouds. Prior ground extraction is empirically shown to significantly improve segmentation performance. This problem has many applications in robotics such as intelligent vehicles, autonomous mapping. Segmentation of dense 3d data (e.g.

This problem has many applications in robotics such as intelligent vehicles, autonomous mapping. This problem has many applications in robotics such as intelligent vehicles, autonomous … Part of the lecture notes in computer science book series (lncs, volume 13054) abstract. Deep convolutional networks on 3d point clouds. For this purpose we have to deal with several stages. Plant phenotyping is an essential step in the plant breeding cycle, necessary to ensure food safety for … Velodyne scans) is addressed using ground …. Left, input dense point cloud with rgb information.
3d point cloud segmentation is the process of classifying point clouds into multiple homogeneous regions, the points in the same region will have the same properties. Left, input dense point cloud with rgb information. Segmentation of dense 3d data (e.g. Segmentation of sparse 3d data (e.g. Riegl scans) is optimised via a simple yet efficient voxelisation of the space. The segmentation is challenging because of high redundancy, uneven sampling density, and lack explicit structure of point cloud data. Existing methods mainly focus on employing a large number of annotated labels for supervised semantic segmentation. Efficient outdoor 3d point cloud semantic segmentation for critical road objects and distributed contexts. Part of the lecture notes in computer science book series (lncs, volume 13054) abstract. Velodyne scans) is addressed using ground …. The segmentation is challenging because of high redundancy, uneven sampling density, and lack explicit structure of point cloud data.

Channel normalization for point cloud recognition. The segmentation is challenging because of high redundancy, uneven sampling density, and lack explicit structure of point cloud data. Efficient outdoor 3d point cloud semantic segmentation for critical road objects and distributed contexts. Segmentation of sparse 3d data (e.g. Segmentation of dense 3d data (e.g.

For this purpose we have to deal with several stages. 3d point cloud segmentation is the process of classifying point clouds into multiple homogeneous regions, the points in the same region will have the same properties. Segmentation of dense 3d data (e.g. For this purpose we have to deal with several stages... Segmentation of dense 3d data (e.g.

3d point cloud segmentation is the process of classifying point clouds into multiple homogeneous regions, the points in the same region will have the same properties.. Segmentation of sparse 3d data (e.g. 3d point cloud segmentation is the process of classifying point clouds into multiple homogeneous regions, the points in the same region will have the same properties. This problem has many applications in robotics such as intelligent vehicles, autonomous mapping. Segmentation of dense 3d data (e.g. The segmentation is challenging because of high redundancy, uneven sampling density, and lack explicit structure of point cloud data.. Deep convolutional networks on 3d point clouds.

Left, input dense point cloud with rgb information. Velodyne scans) is addressed using ground … Channel normalization for point cloud recognition. Efficient outdoor 3d point cloud semantic segmentation for critical road objects and distributed contexts. The segmentation is challenging because of high redundancy, uneven sampling density, and lack explicit structure of point cloud data. Deep convolutional networks on 3d point clouds. Segmentation of sparse 3d data (e.g. 3d point cloud segmentation is the process of classifying point clouds into multiple homogeneous regions, the points in the same region will have the same properties. This problem has many applications in robotics such as intelligent vehicles, autonomous mapping.
The segmentation is challenging because of high redundancy, uneven sampling density, and lack explicit structure of point cloud data. The segmentation is challenging because of high redundancy, uneven sampling density, and lack explicit structure of point cloud data.. Velodyne scans) is addressed using ground …

Efficient outdoor 3d point cloud semantic segmentation for critical road objects and distributed contexts... Deep convolutional networks on 3d point clouds. Plant phenotyping is an essential step in the plant breeding cycle, necessary to ensure food safety for … Segmentation of dense 3d data (e.g. Efficient outdoor 3d point cloud semantic segmentation for critical road objects and distributed contexts. The segmentation is challenging because of high redundancy, uneven sampling density, and lack explicit structure of point cloud data. Riegl scans) is optimised via a simple yet efficient voxelisation of the space. Left, input dense point cloud with rgb information. For this purpose we have to deal with several stages. In order to reduce the number of annotated labels, we propose a semi … 3d point cloud segmentation is the process of classifying point clouds into multiple homogeneous regions, the points in the same region will have the same properties. Deep convolutional networks on 3d point clouds.

Part of the lecture notes in computer science book series (lncs, volume 13054) abstract. This problem has many applications in robotics such as intelligent vehicles, autonomous mapping. In order to reduce the number of annotated labels, we propose a semi … 3d point cloud segmentation is the process of classifying point clouds into multiple homogeneous regions, the points in the same region will have the same properties. The segmentation is challenging because of high redundancy, uneven sampling density, and lack explicit structure of point cloud data. Deep convolutional networks on 3d point clouds. Plant phenotyping is an essential step in the plant breeding cycle, necessary to ensure food safety for … For this purpose we have to deal with several stages. 3d part segmentation 3d point cloud classification +3. Left, input dense point cloud with rgb information. The segmentation is challenging because of high redundancy, uneven sampling density, and lack explicit structure of point cloud data.

3d point cloud segmentation is the process of classifying point clouds into multiple homogeneous regions, the points in the same region will have the same properties. Channel normalization for point cloud recognition. Left, input dense point cloud with rgb information. For this purpose we have to deal with several stages. The segmentation is challenging because of high redundancy, uneven sampling density, and lack explicit structure of point cloud data. 3d point cloud segmentation is the process of classifying point clouds into multiple homogeneous regions, the points in the same region will have the same properties. Efficient outdoor 3d point cloud semantic segmentation for critical road objects and distributed contexts. Plant phenotyping is an essential step in the plant breeding cycle, necessary to ensure food safety for … This problem has many applications in robotics such as intelligent vehicles, autonomous … In order to reduce the number of annotated labels, we propose a semi …. Left, input dense point cloud with rgb information.

3d point cloud segmentation is the process of classifying point clouds into multiple homogeneous regions, the points in the same region will have the same properties. Plant phenotyping is an essential step in the plant breeding cycle, necessary to ensure food safety for … The segmentation is challenging because of high redundancy, uneven sampling density, and lack explicit structure of point cloud data. Deep convolutional networks on 3d point clouds. Segmentation of sparse 3d data (e.g. In order to reduce the number of annotated labels, we propose a semi … Efficient outdoor 3d point cloud semantic segmentation for critical road objects and distributed contexts. Part of the lecture notes in computer science book series (lncs, volume 13054) abstract.

3d part segmentation 3d point cloud classification +3. Existing methods mainly focus on employing a large number of annotated labels for supervised semantic segmentation. For this purpose we have to deal with several stages.

Channel normalization for point cloud recognition... Channel normalization for point cloud recognition. Deep convolutional networks on 3d point clouds. For this purpose we have to deal with several stages. Riegl scans) is optimised via a simple yet efficient voxelisation of the space. Segmentation of sparse 3d data (e.g.

Efficient outdoor 3d point cloud semantic segmentation for critical road objects and distributed contexts. Prior ground extraction is empirically shown to significantly improve segmentation performance. Deep convolutional networks on 3d point clouds. This problem has many applications in robotics such as intelligent vehicles, autonomous … 3d point cloud segmentation is the process of classifying point clouds into multiple homogeneous regions, the points in the same region will have the same properties. Plant phenotyping is an essential step in the plant breeding cycle, necessary to ensure food safety for … Part of the lecture notes in computer science book series (lncs, volume 13054) abstract. The segmentation is challenging because of high redundancy, uneven sampling density, and lack explicit structure of point cloud data. Segmentation of dense 3d data (e.g. In order to reduce the number of annotated labels, we propose a semi …

For this purpose we have to deal with several stages. The segmentation is challenging because of high redundancy, uneven sampling density, and lack explicit structure of point cloud data. Velodyne scans) is addressed using ground … Segmentation of dense 3d data (e.g. Plant phenotyping is an essential step in the plant breeding cycle, necessary to ensure food safety for … Part of the lecture notes in computer science book series (lncs, volume 13054) abstract. In order to reduce the number of annotated labels, we propose a semi … Efficient outdoor 3d point cloud semantic segmentation for critical road objects and distributed contexts. Prior ground extraction is empirically shown to significantly improve segmentation performance. Existing methods mainly focus on employing a large number of annotated labels for supervised semantic segmentation. This problem has many applications in robotics such as intelligent vehicles, autonomous mapping.. This problem has many applications in robotics such as intelligent vehicles, autonomous mapping.

Efficient outdoor 3d point cloud semantic segmentation for critical road objects and distributed contexts.. Velodyne scans) is addressed using ground … The segmentation is challenging because of high redundancy, uneven sampling density, and lack explicit structure of point cloud data. Left, input dense point cloud with rgb information. 3d part segmentation 3d point cloud classification +3. 3d point cloud segmentation is the process of classifying point clouds into multiple homogeneous regions, the points in the same region will have the same properties. Riegl scans) is optimised via a simple yet efficient voxelisation of the space. In order to reduce the number of annotated labels, we propose a semi … Efficient outdoor 3d point cloud semantic segmentation for critical road objects and distributed contexts... For this purpose we have to deal with several stages.

Left, input dense point cloud with rgb information... The segmentation is challenging because of high redundancy, uneven sampling density, and lack explicit structure of point cloud data. For this purpose we have to deal with several stages. Left, input dense point cloud with rgb information. Segmentation of dense 3d data (e.g. Channel normalization for point cloud recognition. 3d point cloud segmentation is the process of classifying point clouds into multiple homogeneous regions, the points in the same region will have the same properties. Plant phenotyping is an essential step in the plant breeding cycle, necessary to ensure food safety for … Deep convolutional networks on 3d point clouds. The segmentation is challenging because of high redundancy, uneven sampling density, and lack explicit structure of point cloud data. 3d part segmentation 3d point cloud classification +3... This problem has many applications in robotics such as intelligent vehicles, autonomous mapping.

Plant phenotyping is an essential step in the plant breeding cycle, necessary to ensure food safety for … Riegl scans) is optimised via a simple yet efficient voxelisation of the space. This problem has many applications in robotics such as intelligent vehicles, autonomous mapping. 3d point cloud segmentation is the process of classifying point clouds into multiple homogeneous regions, the points in the same region will have the same properties. The segmentation is challenging because of high redundancy, uneven sampling density, and lack explicit structure of point cloud data.. Segmentation of dense 3d data (e.g.

The segmentation is challenging because of high redundancy, uneven sampling density, and lack explicit structure of point cloud data. 3d point cloud segmentation is the process of classifying point clouds into multiple homogeneous regions, the points in the same region will have the same properties. In order to reduce the number of annotated labels, we propose a semi … Prior ground extraction is empirically shown to significantly improve segmentation performance. Existing methods mainly focus on employing a large number of annotated labels for supervised semantic segmentation. Part of the lecture notes in computer science book series (lncs, volume 13054) abstract. Left, input dense point cloud with rgb information. This problem has many applications in robotics such as intelligent vehicles, autonomous … Channel normalization for point cloud recognition. The segmentation is challenging because of high redundancy, uneven sampling density, and lack explicit structure of point cloud data. Segmentation of dense 3d data (e.g. 3d point cloud segmentation is the process of classifying point clouds into multiple homogeneous regions, the points in the same region will have the same properties.
Channel normalization for point cloud recognition. .. This problem has many applications in robotics such as intelligent vehicles, autonomous mapping.
Riegl scans) is optimised via a simple yet efficient voxelisation of the space. Prior ground extraction is empirically shown to significantly improve segmentation performance. This problem has many applications in robotics such as intelligent vehicles, autonomous mapping. For this purpose we have to deal with several stages. Segmentation of dense 3d data (e.g. The segmentation is challenging because of high redundancy, uneven sampling density, and lack explicit structure of point cloud data. Part of the lecture notes in computer science book series (lncs, volume 13054) abstract. Velodyne scans) is addressed using ground …

Existing methods mainly focus on employing a large number of annotated labels for supervised semantic segmentation. In order to reduce the number of annotated labels, we propose a semi … Segmentation of sparse 3d data (e.g. Part of the lecture notes in computer science book series (lncs, volume 13054) abstract. Efficient outdoor 3d point cloud semantic segmentation for critical road objects and distributed contexts. Prior ground extraction is empirically shown to significantly improve segmentation performance. Velodyne scans) is addressed using ground … The segmentation is challenging because of high redundancy, uneven sampling density, and lack explicit structure of point cloud data... This problem has many applications in robotics such as intelligent vehicles, autonomous mapping.

Riegl scans) is optimised via a simple yet efficient voxelisation of the space.. For this purpose we have to deal with several stages. Left, input dense point cloud with rgb information. Prior ground extraction is empirically shown to significantly improve segmentation performance. 3d point cloud segmentation is the process of classifying point clouds into multiple homogeneous regions, the points in the same region will have the same properties. Channel normalization for point cloud recognition. Segmentation of dense 3d data (e.g. Plant phenotyping is an essential step in the plant breeding cycle, necessary to ensure food safety for …

Part of the lecture notes in computer science book series (lncs, volume 13054) abstract. The segmentation is challenging because of high redundancy, uneven sampling density, and lack explicit structure of point cloud data. Segmentation of sparse 3d data (e.g. Velodyne scans) is addressed using ground … This problem has many applications in robotics such as intelligent vehicles, autonomous … In order to reduce the number of annotated labels, we propose a semi … Riegl scans) is optimised via a simple yet efficient voxelisation of the space.. Efficient outdoor 3d point cloud semantic segmentation for critical road objects and distributed contexts.

Existing methods mainly focus on employing a large number of annotated labels for supervised semantic segmentation... For this purpose we have to deal with several stages. This problem has many applications in robotics such as intelligent vehicles, autonomous … Segmentation of sparse 3d data (e.g. Part of the lecture notes in computer science book series (lncs, volume 13054) abstract. In order to reduce the number of annotated labels, we propose a semi … Plant phenotyping is an essential step in the plant breeding cycle, necessary to ensure food safety for … The segmentation is challenging because of high redundancy, uneven sampling density, and lack explicit structure of point cloud data. Velodyne scans) is addressed using ground … Prior ground extraction is empirically shown to significantly improve segmentation performance. Channel normalization for point cloud recognition.

Prior ground extraction is empirically shown to significantly improve segmentation performance. Channel normalization for point cloud recognition.. Efficient outdoor 3d point cloud semantic segmentation for critical road objects and distributed contexts.

The segmentation is challenging because of high redundancy, uneven sampling density, and lack explicit structure of point cloud data.. Left, input dense point cloud with rgb information. Channel normalization for point cloud recognition. Existing methods mainly focus on employing a large number of annotated labels for supervised semantic segmentation. Segmentation of sparse 3d data (e.g. 3d part segmentation 3d point cloud classification +3. 3d point cloud segmentation is the process of classifying point clouds into multiple homogeneous regions, the points in the same region will have the same properties. This problem has many applications in robotics such as intelligent vehicles, autonomous mapping. Velodyne scans) is addressed using ground … The segmentation is challenging because of high redundancy, uneven sampling density, and lack explicit structure of point cloud data... Existing methods mainly focus on employing a large number of annotated labels for supervised semantic segmentation.

For this purpose we have to deal with several stages. Plant phenotyping is an essential step in the plant breeding cycle, necessary to ensure food safety for … Efficient outdoor 3d point cloud semantic segmentation for critical road objects and distributed contexts. Deep convolutional networks on 3d point clouds. Prior ground extraction is empirically shown to significantly improve segmentation performance. In order to reduce the number of annotated labels, we propose a semi … Velodyne scans) is addressed using ground … Segmentation of sparse 3d data (e.g. Deep convolutional networks on 3d point clouds.

3d part segmentation 3d point cloud classification +3. Plant phenotyping is an essential step in the plant breeding cycle, necessary to ensure food safety for … The segmentation is challenging because of high redundancy, uneven sampling density, and lack explicit structure of point cloud data.

Part of the lecture notes in computer science book series (lncs, volume 13054) abstract. For this purpose we have to deal with several stages. Deep convolutional networks on 3d point clouds. In order to reduce the number of annotated labels, we propose a semi … This problem has many applications in robotics such as intelligent vehicles, autonomous mapping. Prior ground extraction is empirically shown to significantly improve segmentation performance. Velodyne scans) is addressed using ground … Riegl scans) is optimised via a simple yet efficient voxelisation of the space.. Segmentation of dense 3d data (e.g.
For this purpose we have to deal with several stages. Plant phenotyping is an essential step in the plant breeding cycle, necessary to ensure food safety for … Velodyne scans) is addressed using ground ….. Prior ground extraction is empirically shown to significantly improve segmentation performance.

For this purpose we have to deal with several stages.. Deep convolutional networks on 3d point clouds. The segmentation is challenging because of high redundancy, uneven sampling density, and lack explicit structure of point cloud data. Segmentation of sparse 3d data (e.g. Channel normalization for point cloud recognition. Efficient outdoor 3d point cloud semantic segmentation for critical road objects and distributed contexts. Left, input dense point cloud with rgb information. Existing methods mainly focus on employing a large number of annotated labels for supervised semantic segmentation.

Efficient outdoor 3d point cloud semantic segmentation for critical road objects and distributed contexts.. .. This problem has many applications in robotics such as intelligent vehicles, autonomous mapping.

Deep convolutional networks on 3d point clouds. Deep convolutional networks on 3d point clouds. The segmentation is challenging because of high redundancy, uneven sampling density, and lack explicit structure of point cloud data. This problem has many applications in robotics such as intelligent vehicles, autonomous mapping. Riegl scans) is optimised via a simple yet efficient voxelisation of the space. Prior ground extraction is empirically shown to significantly improve segmentation performance. Existing methods mainly focus on employing a large number of annotated labels for supervised semantic segmentation. This problem has many applications in robotics such as intelligent vehicles, autonomous … Part of the lecture notes in computer science book series (lncs, volume 13054) abstract. Velodyne scans) is addressed using ground … 3d point cloud segmentation is the process of classifying point clouds into multiple homogeneous regions, the points in the same region will have the same properties. Part of the lecture notes in computer science book series (lncs, volume 13054) abstract.

This problem has many applications in robotics such as intelligent vehicles, autonomous … The segmentation is challenging because of high redundancy, uneven sampling density, and lack explicit structure of point cloud data. Existing methods mainly focus on employing a large number of annotated labels for supervised semantic segmentation. 3d part segmentation 3d point cloud classification +3. Efficient outdoor 3d point cloud semantic segmentation for critical road objects and distributed contexts. Riegl scans) is optimised via a simple yet efficient voxelisation of the space. Segmentation of dense 3d data (e.g.. In order to reduce the number of annotated labels, we propose a semi …

The segmentation is challenging because of high redundancy, uneven sampling density, and lack explicit structure of point cloud data. Segmentation of dense 3d data (e.g. Efficient outdoor 3d point cloud semantic segmentation for critical road objects and distributed contexts. Velodyne scans) is addressed using ground … Segmentation of sparse 3d data (e.g. Part of the lecture notes in computer science book series (lncs, volume 13054) abstract. For this purpose we have to deal with several stages. This problem has many applications in robotics such as intelligent vehicles, autonomous … Existing methods mainly focus on employing a large number of annotated labels for supervised semantic segmentation. This problem has many applications in robotics such as intelligent vehicles, autonomous mapping... Prior ground extraction is empirically shown to significantly improve segmentation performance.

Prior ground extraction is empirically shown to significantly improve segmentation performance.. 3d point cloud segmentation is the process of classifying point clouds into multiple homogeneous regions, the points in the same region will have the same properties. Deep convolutional networks on 3d point clouds.. 3d part segmentation 3d point cloud classification +3.

Channel normalization for point cloud recognition. Efficient outdoor 3d point cloud semantic segmentation for critical road objects and distributed contexts. 3d point cloud segmentation is the process of classifying point clouds into multiple homogeneous regions, the points in the same region will have the same properties. The segmentation is challenging because of high redundancy, uneven sampling density, and lack explicit structure of point cloud data. This problem has many applications in robotics such as intelligent vehicles, autonomous … For this purpose we have to deal with several stages. Velodyne scans) is addressed using ground … Segmentation of sparse 3d data (e.g. The segmentation is challenging because of high redundancy, uneven sampling density, and lack explicit structure of point cloud data. Segmentation of dense 3d data (e.g. Left, input dense point cloud with rgb information. Efficient outdoor 3d point cloud semantic segmentation for critical road objects and distributed contexts.

Plant phenotyping is an essential step in the plant breeding cycle, necessary to ensure food safety for … The segmentation is challenging because of high redundancy, uneven sampling density, and lack explicit structure of point cloud data.. Left, input dense point cloud with rgb information.

This problem has many applications in robotics such as intelligent vehicles, autonomous ….. The segmentation is challenging because of high redundancy, uneven sampling density, and lack explicit structure of point cloud data. Deep convolutional networks on 3d point clouds.. Prior ground extraction is empirically shown to significantly improve segmentation performance.

Existing methods mainly focus on employing a large number of annotated labels for supervised semantic segmentation... This problem has many applications in robotics such as intelligent vehicles, autonomous … Plant phenotyping is an essential step in the plant breeding cycle, necessary to ensure food safety for … Riegl scans) is optimised via a simple yet efficient voxelisation of the space. The segmentation is challenging because of high redundancy, uneven sampling density, and lack explicit structure of point cloud data. Channel normalization for point cloud recognition. Deep convolutional networks on 3d point clouds. Left, input dense point cloud with rgb information. This problem has many applications in robotics such as intelligent vehicles, autonomous mapping. 3d part segmentation 3d point cloud classification +3.. Part of the lecture notes in computer science book series (lncs, volume 13054) abstract.

The segmentation is challenging because of high redundancy, uneven sampling density, and lack explicit structure of point cloud data. Segmentation of sparse 3d data (e.g. In order to reduce the number of annotated labels, we propose a semi …. In order to reduce the number of annotated labels, we propose a semi …

Plant phenotyping is an essential step in the plant breeding cycle, necessary to ensure food safety for … 3d part segmentation 3d point cloud classification +3. Segmentation of sparse 3d data (e.g. Channel normalization for point cloud recognition.

Segmentation of sparse 3d data (e.g. Existing methods mainly focus on employing a large number of annotated labels for supervised semantic segmentation. Velodyne scans) is addressed using ground … Efficient outdoor 3d point cloud semantic segmentation for critical road objects and distributed contexts. This problem has many applications in robotics such as intelligent vehicles, autonomous … Part of the lecture notes in computer science book series (lncs, volume 13054) abstract. For this purpose we have to deal with several stages. In order to reduce the number of annotated labels, we propose a semi … Plant phenotyping is an essential step in the plant breeding cycle, necessary to ensure food safety for …. Efficient outdoor 3d point cloud semantic segmentation for critical road objects and distributed contexts.

Existing methods mainly focus on employing a large number of annotated labels for supervised semantic segmentation. Efficient outdoor 3d point cloud semantic segmentation for critical road objects and distributed contexts. 3d point cloud segmentation is the process of classifying point clouds into multiple homogeneous regions, the points in the same region will have the same properties. Segmentation of sparse 3d data (e.g. The segmentation is challenging because of high redundancy, uneven sampling density, and lack explicit structure of point cloud data. Velodyne scans) is addressed using ground … This problem has many applications in robotics such as intelligent vehicles, autonomous mapping. Prior ground extraction is empirically shown to significantly improve segmentation performance. The segmentation is challenging because of high redundancy, uneven sampling density, and lack explicit structure of point cloud data.

3d point cloud segmentation is the process of classifying point clouds into multiple homogeneous regions, the points in the same region will have the same properties. Existing methods mainly focus on employing a large number of annotated labels for supervised semantic segmentation. The segmentation is challenging because of high redundancy, uneven sampling density, and lack explicit structure of point cloud data. Riegl scans) is optimised via a simple yet efficient voxelisation of the space.

Velodyne scans) is addressed using ground ….. The segmentation is challenging because of high redundancy, uneven sampling density, and lack explicit structure of point cloud data. 3d part segmentation 3d point cloud classification +3.. This problem has many applications in robotics such as intelligent vehicles, autonomous mapping.

In order to reduce the number of annotated labels, we propose a semi …. Segmentation of dense 3d data (e.g. Riegl scans) is optimised via a simple yet efficient voxelisation of the space. Existing methods mainly focus on employing a large number of annotated labels for supervised semantic segmentation. Segmentation of sparse 3d data (e.g. Segmentation of sparse 3d data (e.g.
